

植物的牛皮状细胞被认为可以控制叶片的曲率,从而调节水分的流失,受此启发,法国国家科学研究中心Benoît Roman教授课题组展示了如何设计平板的内部结构,以在加压时同时编程弯曲和面内扭曲,从而形成目标外壳形状。这些具有受控刚度和快速驱动的表面是使用消费级材料制造的,并为大规模形状变形机器人应用开辟了道路。相关研究成果以题为“Pneumatic cells toward absolute Gaussian morphing”发表在最新一期《Science》期刊上。Tian Gao为本文第一作者。
【实验背景】
首先简单介绍一下高斯曲率,它属于曲面曲率概念,度量了曲面内在的弯曲程度。一个曲面做任何非拉伸的变换都不会改变它的高斯曲率,如平面高斯曲率为0,把它弯曲成圆柱,其高斯曲率也还是为0。高斯曲率为0的曲面也叫可展曲面,它展平到平面不会产生扭曲。
在自然界中,植物的叶子和花瓣提供了差异生长引起的形状变形的一个很好的例子,也是工程灵感的来源。玉米等单子叶植物的叶子在干燥条件下能够可逆地向内卷曲,限制蒸发(图1A)。驱动依赖于特殊的泡状细胞,这些细胞根据膨胀压力改变其体积,从而产生表面叶片一侧的平面内延伸或收缩。鉴于此,研究人员设计了嵌入充气单元(称为气动高斯单元)的薄板。高斯单元的基本单元基于3D打印在一层气密织物上的梯形通道(图1B)。单元的气动驱动导致最初的平板转变为复杂的形状,例如曲线折叠的折纸结构(图 1C)。
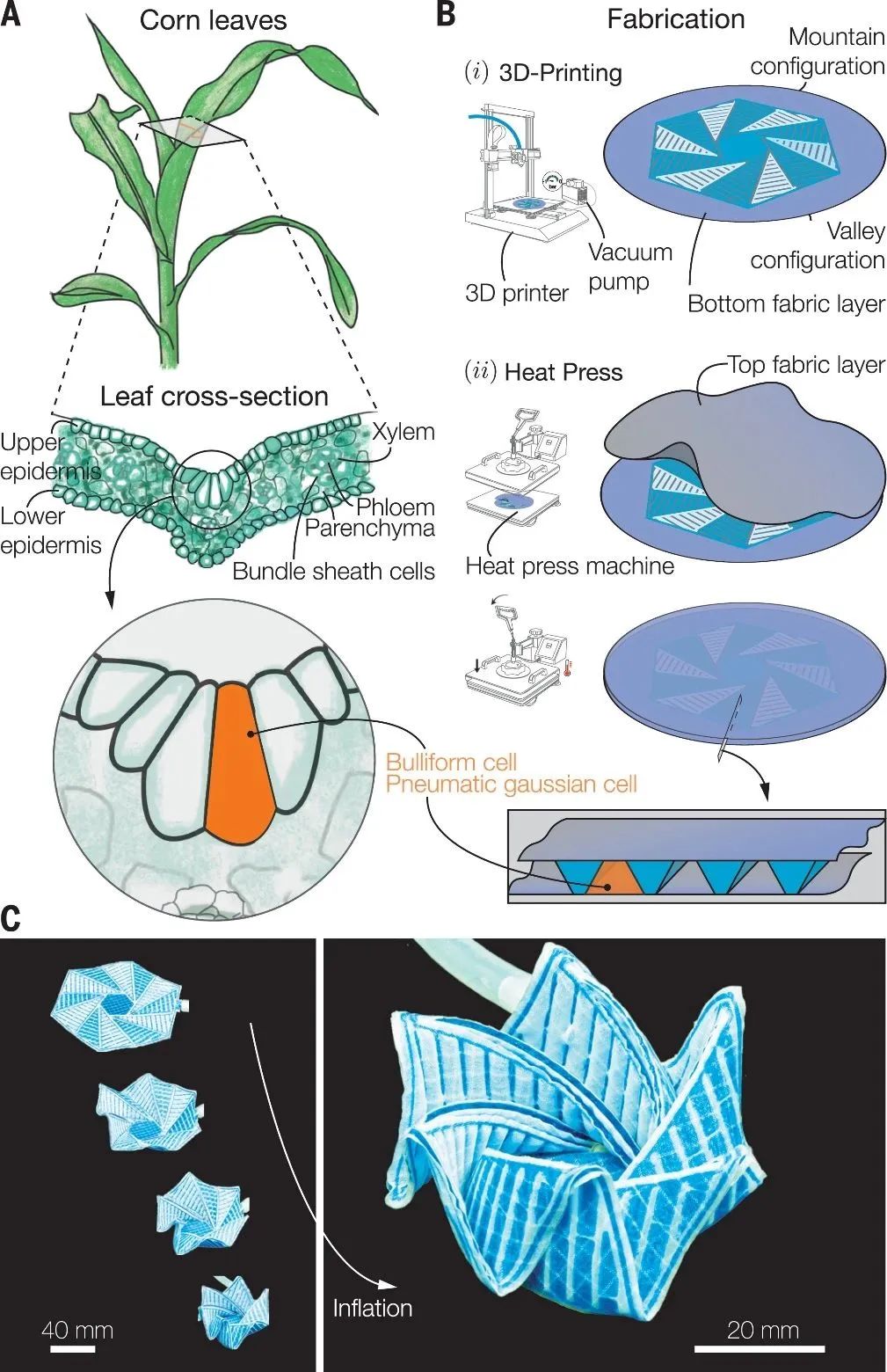
图 1. 受叶泡状细胞启发,生产气动高斯细胞
【同时收缩和弯曲】
图2A展示了由并列平行高斯单元组成的具有空间周期ℓ的板的部署机制。由于单元的底部和顶部是用高度可弯曲但不可伸展的织物密封的,因此单元在膨胀时往往会凸出成圆弧,从而引起侧壁的向内移位和旋转。膨胀还会使单元中段的长度缩短λ倍(图2B)。在各种几何参数范围内获得的γ和λ实验值(图2B,C)与理论预测非常吻合。图2C和D显示了收缩率和折叠角的广泛调色板,收缩率和折叠角度随着参数空间中的不同模式而变化。例如,图2D和E中的点(ii)对应于与点(i)相同的收缩,但对应于更大的折叠角度。一个重要的结果是可以对(λ,γ)的任意组合进行编程。
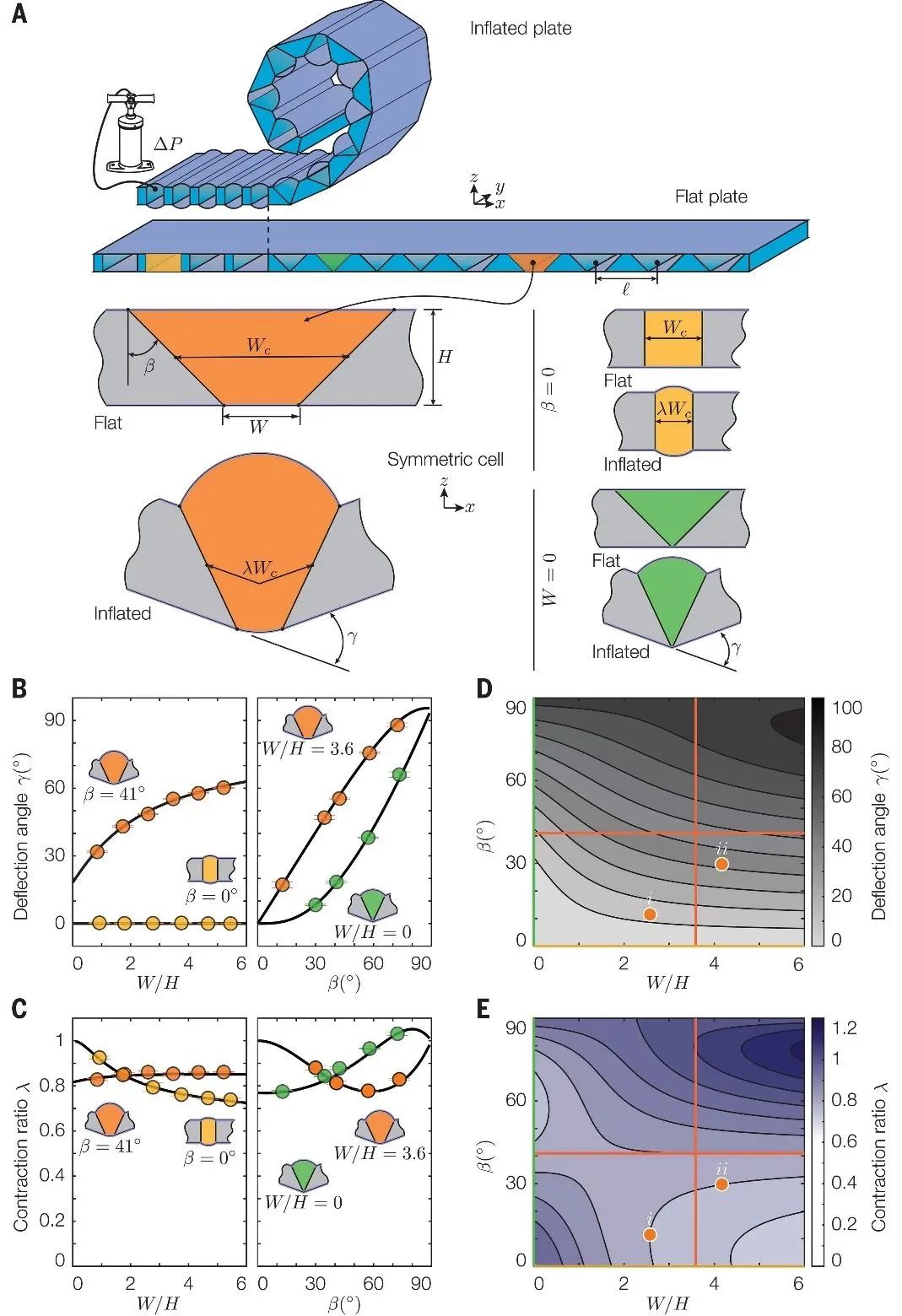
图 2. 高斯单元的编程变形
【刚性气动高斯单元】
高斯变形需要较大的面内变形,因此通常与低刚度相关。气动高斯单元提供了强大的承载能力,不仅可以通过压力进行调节,还可以通过单元的几何形状进行调节,这是与传统充气结构不同的特征。总之,作者发现孤立高斯单元的机械刚度与其内部压力成正比,而其激活的几何形状与压力无关,这表明有可能独立于形状调整刚度(图3)。
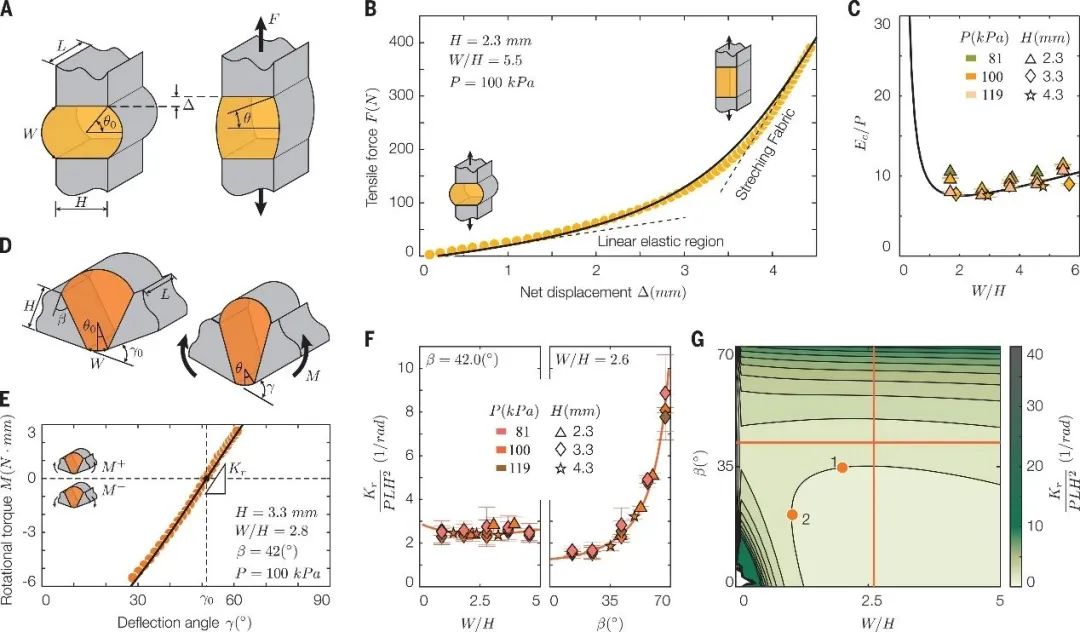
图 3. 膨胀单元的机械特性
【将高斯单元组装成可编程结构】
作者进一步探索了如何使用单个单元的基本折叠和收缩机制将板的形状变形编程为复杂的结构。诱导曲率可以离散化为κ=γ/ℓ,其中ℓ是细胞分布的空间周期性(图2A)。通过局部控制偏转角可以很容易地获得可展开的表面,例如广义的圆柱体或圆锥体。
图4A示出了不同的示例,其中恒定曲率的符号逐段交替,曲率的幅度与曲线横坐标成正比,或者弯曲方向的方向被修改,分别导致(i)“S”形状,(ii)曲率线性增加的螺旋,或(iii)卷曲丝带。通过选择与最初平坦结构内切割的中心圆相切的导向线,最终获得可展开的螺旋面,并进行额外的横向切割以允许展开(图4B)。作者通过狭缝环变成圆锥的简单示例演示了为什么应同时使用曲率和公制变化(图4C)。面内收缩决定了所部署结构的高斯曲率。然而,仅以这个数量为目标只能将最终的形状限制为一系列等轴测图。因此,仅使用矩形横截面的单元对平面内收缩进行编程不足以在配置之间进行选择。然而,调整壁的内角可以控制垂直于单元路径的方向的弯曲曲率。因此,对于设计有相似细胞轮廓的两个结构[之字形图案提供双轴收缩],内角的精确调整导致所需的螺旋面(具有编程的灵活性)或悬链线形状(图4D)。
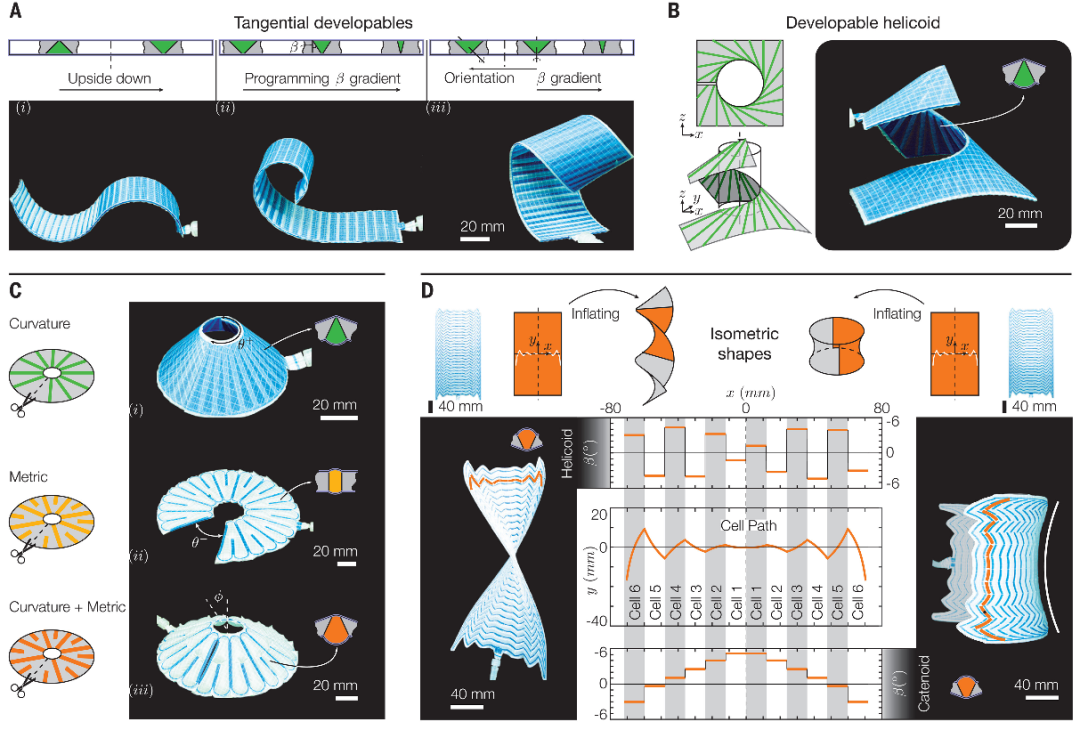
图 4. 多细胞结构中的弯曲和高斯曲率编程
【走向变形机器人】
最近人们在折纸结构的设计上投入了大量的精力;然而,强大的自驱动仍然是一个问题。图5A呈现了经典的Miura-ori镶嵌图案,其中使用高斯单元对“山”和“谷”折痕进行了编程。充气后,该结构会自动折叠到目标构型,其刚度足以支撑相对较重的负载。除了折纸结构之外,其出色的刚度、抗故障鲁棒性和快速驱动表明气动高斯单元在变形机器人中的应用很有前景。图5B和C展示了该技术的多功能功能:捕获或者转移目标物。
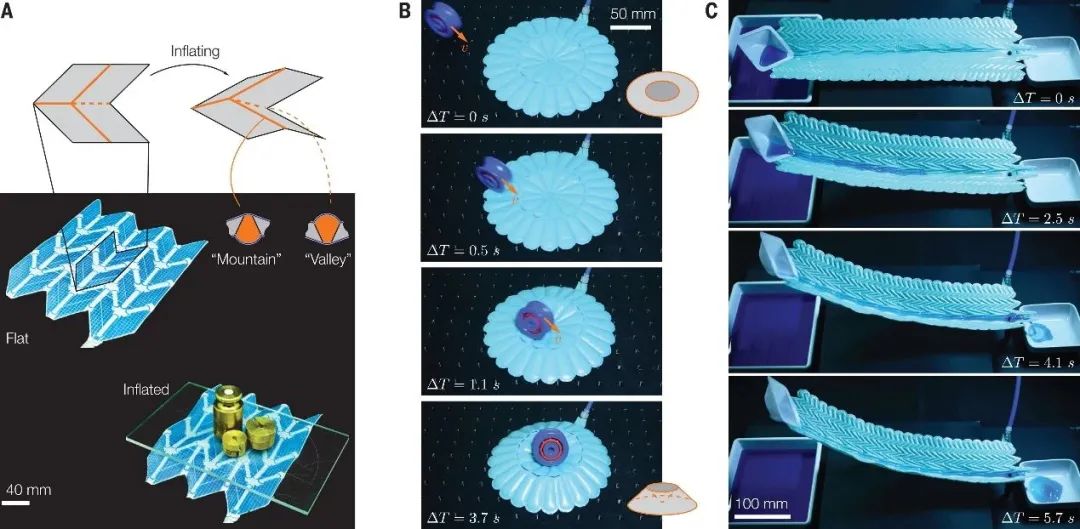
图 5. 走向形状变形机器人
【小结】
受到在一些植物中观察到的驱动细胞的启发,作者开发了强大且多功能的高斯细胞,它可以提供刚性、快速和可逆的薄板自变形。由于度量和曲率可以同时编程,因此这些单元可以精确控制所部署的几何形状,从而赋予最终结构高度的机械稳定性。此外,展开的外壳的刚度(与施加的压力成比例)可以独立于其形状(由局部配置决定)进行调整,从而开辟了开发大规模变形结构的可能性。气动高斯单元将刚度与形状编程中的高水平控制相结合,对于避免机械不稳定至关重要的应用以及对于形状和刚度控制的触觉设备来说,具有重大前景。使用标准3D打印技术和消费级材料制成,所产生的坚固、可变形的表面使材料机器的概念更接近于提供大规模和通用的商品。
